
コンピュータマネキンの障害物回避動作の生成
Abstract
人間のCG アニメーションは需要が高い.手のアニメーションは部屋の設計評価,工場での作業空間の評価,車内の快適さ評価などに使われる.その中でも目標に向かって手を伸ばす「リーチ動作」は最も基本的な動作である.リーチ動作の場合,肘の衝突など他の部位を考慮した動きをしなければならない.障害物回避には,その大きさ,位置といった動作の変化を起こす要因が多く,条件ごとのモーションキャプチャデータ取得や,動作の修正は容易ではない.そこで本研究では,動作データがない状態から,人間の障害物環境下における,肘位置の衝突を考慮したリーチ動作生成手法を提案する.
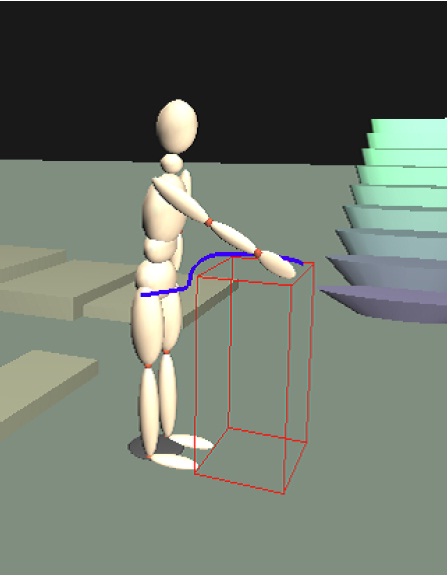
本手法では,空間上のエネルギーを表現する手法であるポテンシャル法を用いた.障害物の大きさ・位置の変化に対応し,輪郭に沿って滑らかなポテンシャル場を生成するために,シグモイド関数の組み合わせを用いた.また,目標の位置までの勾配を作るポテンシャル場を生成し,前述した障害物のポテンシャル場と組み合わせた.このポテンシャル場から障害物を避ける軌跡を算出し,手の位置を決定した.その位置から,拡張した逆運動学を用いて手首,肘,肩,および胴体の姿勢を決定し,腕部の動きだけでは届かない位置の目標に手を伸ばす動作を生成するシステムを実装した.逆運動学による姿勢決定のみでは手に応じて動く各部位が障害物にぶつかる可能性がある.肘関節位置のポテンシャルをもとに,肩関節と手首関節を結ぶ直線を軸とした回転で肘関節位置を調整することで,肘関節の障害物回避を行う手法を提案した.
評価実験では本手法で生成した障害物回避動作が,実際の人間の動作と類似しているか確認するために,人間の動作を動画撮影して比較を行った.その結果,限定的な範囲ではあるが,胴体を大きく倒さず,ねじる動作が必要でない範囲では,障害物回避動作を生成でき,人間の動作にも類似していることを確認した.